Zasnova našega satelita
KolibriSat je sestavljen iz treh 3D-tiskanih modulov in dveh ključnih elektronskih sistemov: pristajalnega in merilnega. Modularnost zagotavlja lažje testiranje, vzdrževanje in nadgradnjo posameznih sklopov.
Mehanska zasnova
Ohišje satelita je sestavljeno iz treh 3D-tiskanih modulov iz PETG in TPU filamentov. Kabli med moduli potekajo skozi vnaprej načrtovane kanale v ohišju, kar zmanjšuje elektromagnetne motnje in zagotavlja mehansko zaščito pred zunanjimi obremenitvami.
Krmilni sistem
- GOKU GN 745 Flight Controller
- T-motor F1203 motorji (×4)
- Zložljive ročke z vzmetmi
- GPS, LoRa & nadzorna antena
Baterija & Merilni sistem
- LiPo baterija
- ESP32-S3 Zero Mini mikrokrmilnik
- Reyax RYLR998 (LoRa 865 MHz)
- DHT11 · BMP280 senzorji
Oddajnik & Kamera
- DJI O4 Air Unit
- Kamera za snemanje pristanka
- Video signal v realnem času
- TPU filament — absorpcija udarcev
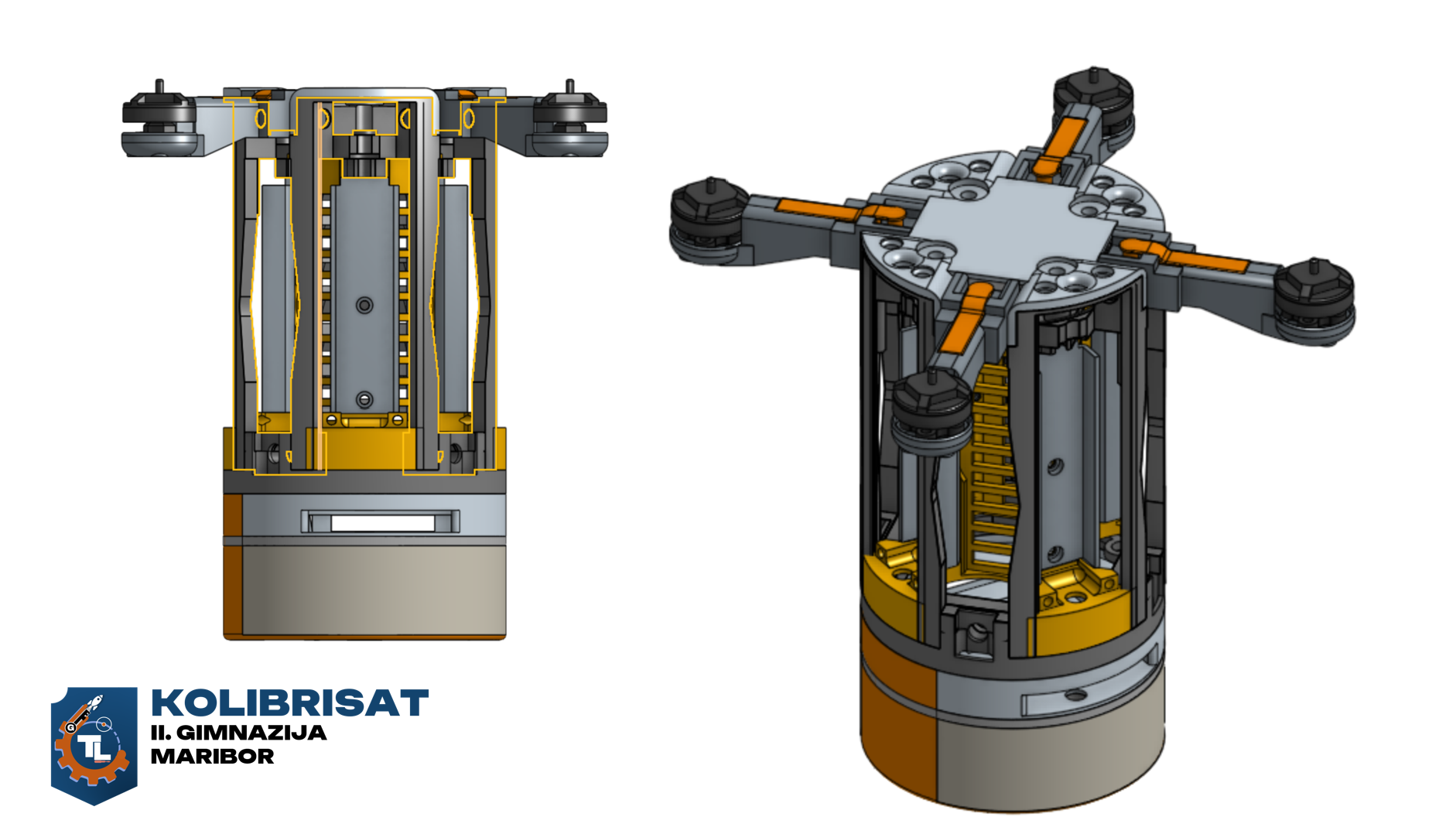
Krmilni sistem
Vrhnji modul nosi srce pristajalnega sistema: GOKU GN 745 flight controller skupaj s štirimi T-motor F1203 motorji na zložljivih ročkah. Med izstrelitvijo so ročke zložene v ohišje; po izmetu iz rakete se samodejno razprejo s pomočjo vzmeti. Modul vsebuje tudi celoten komunikacijski sistem - LoRa in GPS modul.
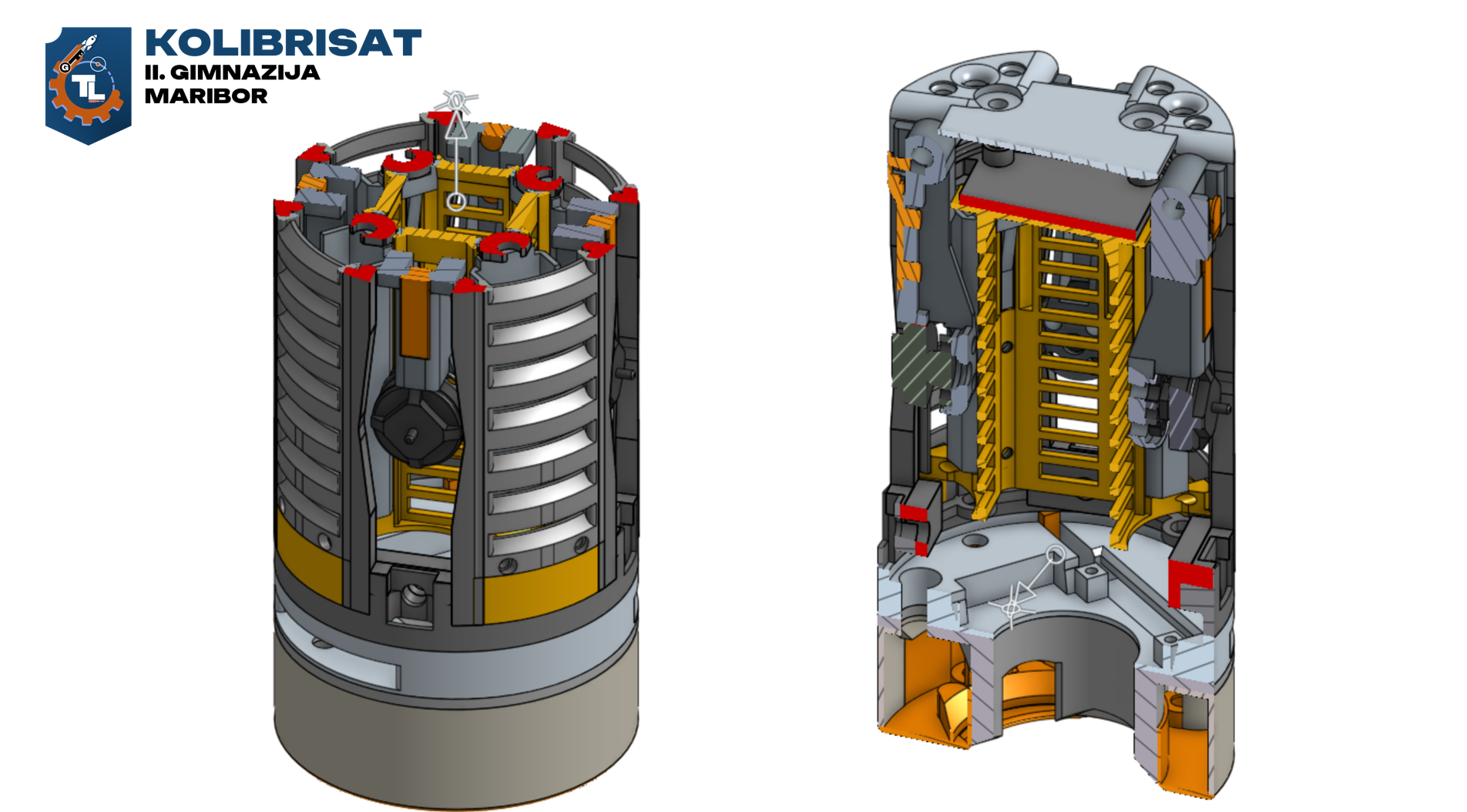
Baterija & Merilni sistem
Srednji modul hrani LiPo baterijo in nosi merilni ter komunikacijski sistem. ESP32-S3 mikrokrmilnik zbira podatke senzorjev in jih prek LoRa transceiverja RYLR998 pošilja na zemeljsko postajo z 2 Hz. Senzorja DHT11 in BMP280 merita temperaturo, vlago in atmosferski tlak.
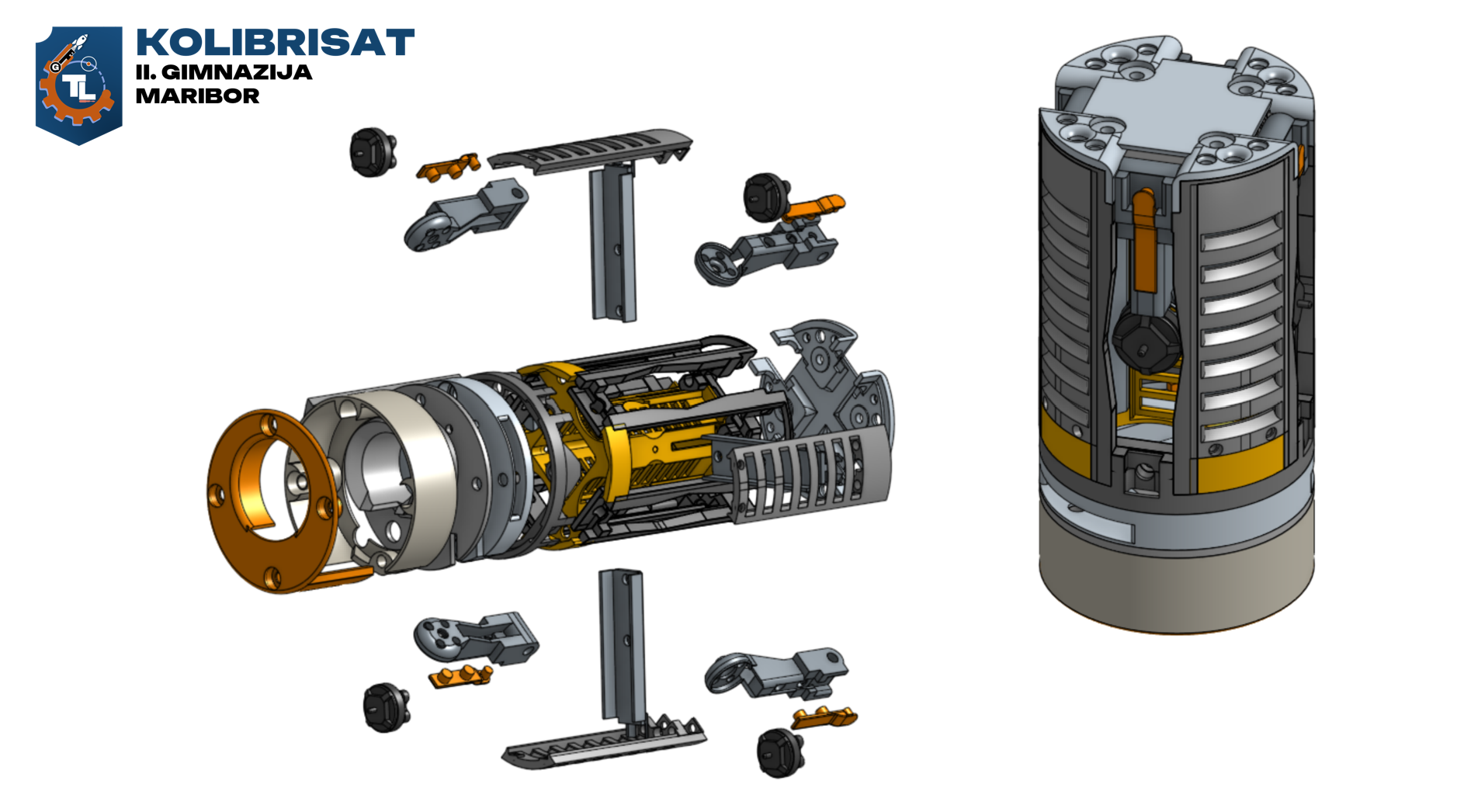
Oddajnik & Kamera
Spodnji modul je natisnjen iz TPU filamenta za absorpcijo udarcev ob pristanku. Vsebuje DJI O4 Air Unit, ki vzpostavlja dvosmerno videopovezavo s postajo DJI Goggles N3, ter kamero za snemanje pristanka v realnem času. Ločen komunikacijski kanal zagotavlja neodvisno delovanje od merilnega sistema.
Fotografije zasnove
Elektronska zasnova
Elektronika KolibriSata je razdeljena na dva popolnoma ločena sistema z neodvisnima komunikacijskima kanaloma — kar zagotavlja, da motnje enega sistema ne vplivajo na delovanje drugega.
Pristajalni sistem
Nadzor pristanka prevzame GOKU GN 745 flight controller v kombinaciji z DJI O4 Air Unit za dvosmerno zvezo s postajo. Sistem deluje samodejno na podlagi senzorjev ali pod ročnim nadzorom prek DJI Goggles N3 in DJI Controller 3. Krmilna programska oprema je iNav, ki omogoča samostojni pristanek in ročno upravljanje.
Merilni sistem
Primarno misijo vodi ESP32-S3 Zero Mini mikrokrmilnik, ki z 2 Hz zbira in oddaja meritve atmosferskih parametrov ter GPS lokacijo na zemeljsko postajo prek LoRa radijskega modula Reyax RYLR998 na 865 MHz. Programska oprema je napisana v C++ z Arduino ogrodjem.
Komponente so med seboj povezane z namenskim žičevjem, speljanim skozi vnaprej načrtovane kanale v ohišju. Napajalni in signalni vodi so ločeni za zanesljivo delovanje senzorjev in komunikacij tudi v zahtevnih pogojih med spuščanjem.
Program za beleženje podatkov
Za sprejem in shranjevanje telemetrije med letom smo razvili namenski program ter prenosno zemeljsko postajo. Skupaj v realnem času sprejemata, obdelata in shranita vse meritve, ki jih KolibriSat oddaja prek LoRa radijskega kanala.
Program za beleženje
Program je napisan v Pythonu in teče na zemeljski postaji med celotnim letom. Sprejema serijske pakete iz priključenega LoRa modula, jih razčleni in v realnem času zapiše v CSV datoteko. Vsak paket vsebuje čas, višino, hitrost, temperaturo, tlak, pospešek in GPS koordinate — skupaj 335 vzorcev pri frekvenci 2 Hz.
Prenosni zapisovalnik
Prenosna zemeljska postaja je zasnovana za enostavno uporabo na terenu. Sestavlja jo prenosni računalnik z LoRa sprejemnikom Reyax RYLR998, priključenim prek USB-serijskega vmesnika. Na njej teče program za beleženje, ki sproti shranjuje in prikazuje vse prejete pakete.